Orientation

Orientation represents the rotation of a marker around its center. These can be accessed as follows:
yaw- the angle of rotation in radians clockwise about the vertical axis.pitch- the angle of rotation in radians upwards about the transverse axis.roll- the angle of rotation in radians clockwise about the longitudinal axis.
markers = vision.detect_markers()
for marker in markers:
print(marker.orientation.yaw)
print(marker.orientation.pitch)
print(marker.orientation.roll)
Examples
The following table visually explains what positive and negative rotations represent.
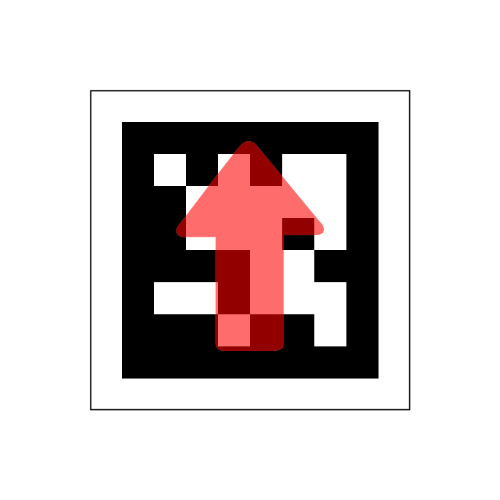
0 in all axes:
| π/4 | -π/4 | |
|---|---|---|
yaw | 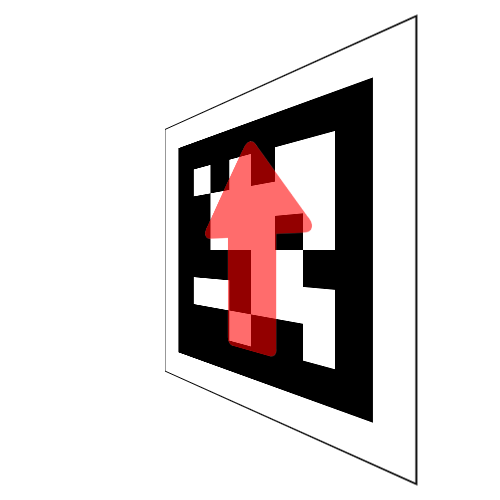 | 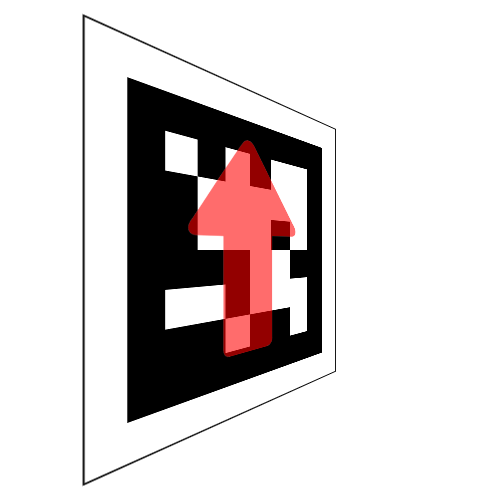 |
pitch | 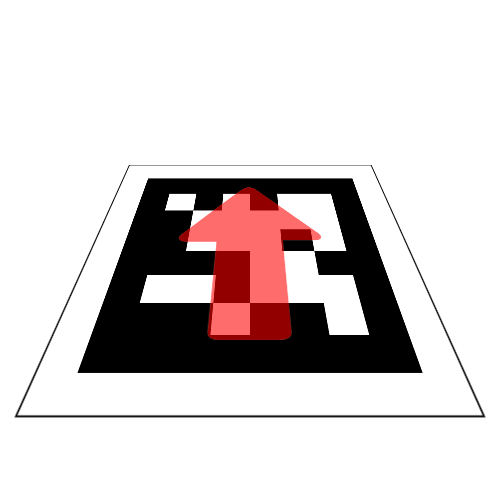 | 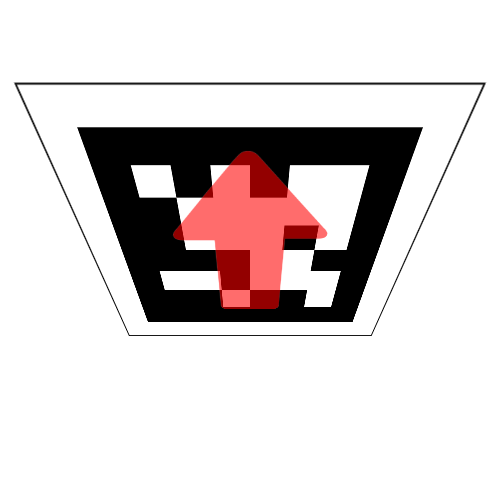 |
roll | 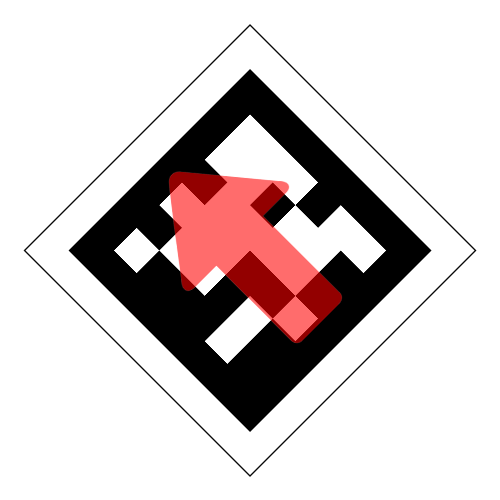 | 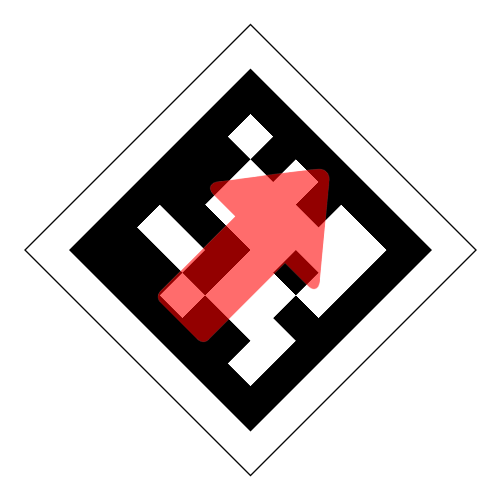 |